- 端口扫描神器:御剑 保姆级教程(附链接)
- IoTSeeker:物联网设备默认密码扫描检测工具
- 小红书怎么以图搜图?
- V10 智能AI语音扫描枪
- 扫描物品快速购买同款
- 基于深度学习的花卉检测与识别系统(YOLOv5清新界面版,Python代码)_1
邮箱:demo@eyoucms.com
手机:13900001111
电话:400-123-4567
地址:广东省广州市天河区某某科技园
从原理到应用 | 详解毫米波雷达Radar
作者?|?BUAA火车侠? 编辑?|?汽车人
原文链接:https://zhuanlan.zhihu.com/p/604265039
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【硬件交流】技术交流群
Radar是 Radio detection and ranging 的简称,即“无线电探测和测距”。常用车规级雷达频率为24GHz和77GHz,对应的波长为12mm、4mm。为什么采用这两种频率,而不采用其他频率的毫米波?不用瞎想,这不是因为什么特别的技术原因,纯粹就是因为频谱资源不够用。
电磁波的每一个频段都会按照规定,分配给特定的设备 or 行业,以防止设备信号之间的相互干扰。这个分配工作是由国际电信联盟_百度百科 (baidu.com)来制定。目前的频段分配十分的紧张,联想一下前几年各国对5G频段的争抢,就不难理解。而24GHZ和77GHz就是国际电信联盟专门划分给车用雷达的频段。
毫米波雷达技术已经相对成熟,特别在军事层面。当前制约车规级毫米波雷达的,主要是性能与体积、成本之间的平衡。
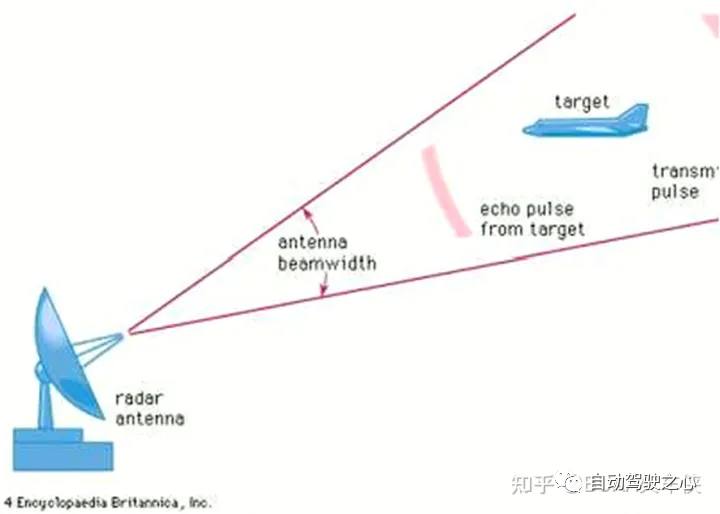
雷达的原理非常朴素易懂:对目标发射电磁波 -> 接收反射回波信号 -> 测量回波的时间、相位等信号 -> 解算目标的距离、速度、角度信息。其衡量指标无非就是量程和分辨率。
2.1 天线
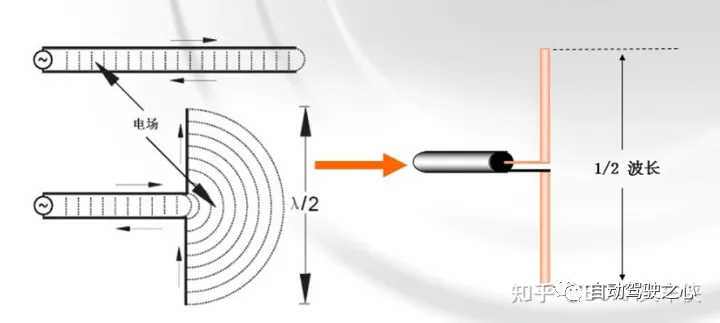
根据交变电流产生电磁波的机理,雷达首先需要一个能够产生高频交变电流的装置,这部分用到压控震荡装置(VCO,voltage-controlled oscillator),输出的震荡频率会随着输入电压而改变(类比、回想大学《数字电路》中的555震荡电路)
然后利用发射天线将高频电流转化为向空间发射的电磁波。接收天线与发射天线是互逆的,天线同样可以将空间中的电磁波转化为交变的电信号。
2.2 距离测量:脉冲与FMCW
脉冲雷达
距离测量的方式很容易想到,雷达发射一个脉冲,测量脉冲信号从发射到返回的“飞行时间Time of Flight—ToF”即可得到,这种方式在激光雷达上十分普遍。
调频连续波 FMCW
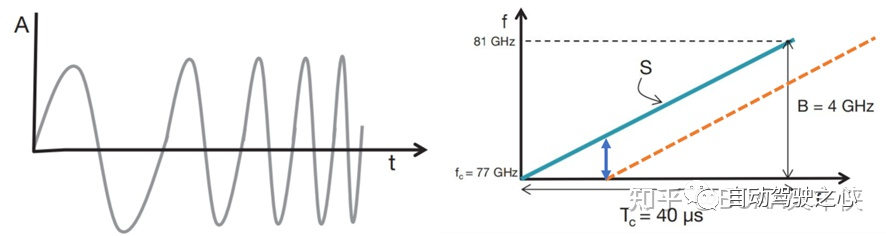
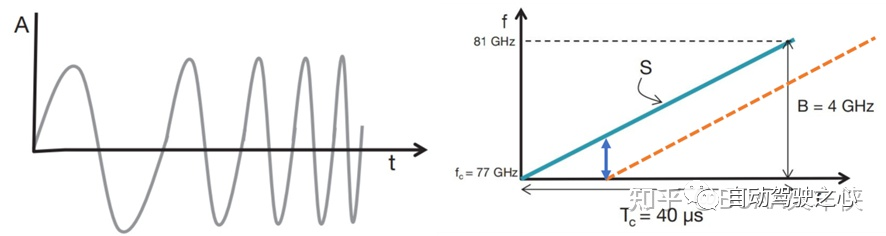
当然,实际上车用雷达并不用这种方式,而是采用 “调频连续波FMCW——Frequency Modulated Continuous Wave”。雷达发射电磁波的频率呈线性变化(注意:是频率线性变化),因此其回波信号也呈线性变化,通过测量当前发射频率与接受频率之差,可得到探测物体的距离,具体的公式推导后面会给到。
2.3 速度测量:多普勒效应
雷达对运动物体速度的测量基于多普勒原理(Christian Johann Doppler,Austria,1842)。简而言之:观测者向着波源运动时,波被压缩,观测到的频率变高;观测者背离博源运动时,波被拉长,观测到的频率变低。回想高中的课堂内容:火车朝你开过来时,汽笛声尖锐;火车背向你开走时,汽笛低沉。
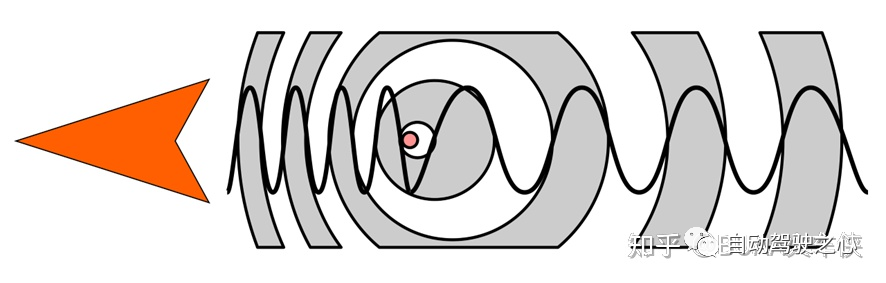
多普勒原理 速度引起的频率偏移是: 依据频率偏移即可计算出目标的相对运动速度。
依据频率偏移即可计算出目标的相对运动速度。
2.4 角度测量:大锅盖 vs MIMO
衡量角度测量的一个重要指标是角分辨率,即两个最小可辨目标之间张角的大小。例如,雷达横向角分辨率为1°,则代表在100m范围内,雷达的“像素”大小为1.74m。如果这时有相邻的两个0.5m的目标,雷达是无法识别的。
自动驾驶要求尽可能高的角分辨率,该怎么办?一个简单的想法是,让发射的电磁波波束尽可能窄,方向性高。此时雷达地角分辨率就是电磁波的波束宽度,配合扫描机构即可实现一定范围内的视场角。激光雷达就是这个原理。
然而,这对于普通雷达是极为困难的。一个简单的点源天线的辐射波形,是趋近于球面波的,我们需要对天线进行设计,才能使其波瓣宽度减小(天线增益大,传播距离也远)。一般天线的波束宽度为:?,其中D为天线口径。天线物理尺寸越大,雷达波束指向性才越强。且天线是无法达到如激光一样 高度一致的方向性的。(激光原理文章后面会提到)。
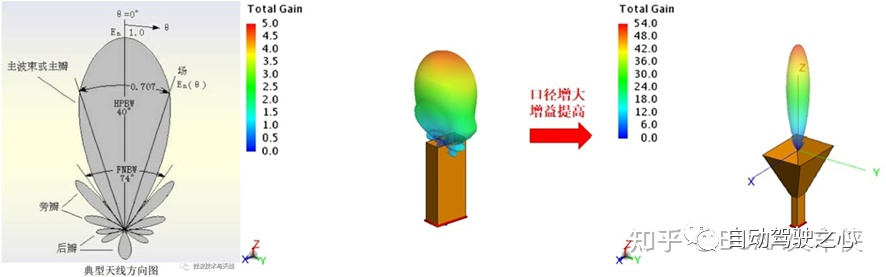
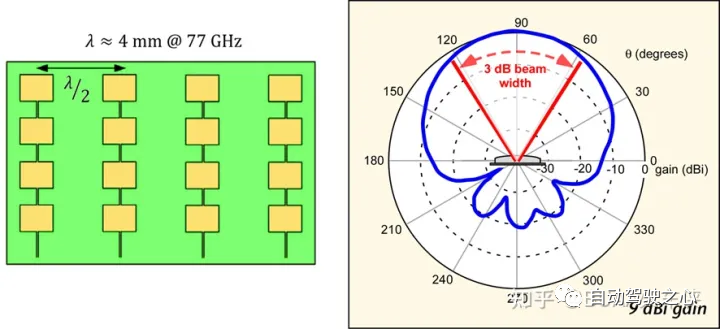
汽车显然不可能顶着一个大锅盖扫描雷达行驶。事实上,车用雷达往往采用的都是贴片天线(CMOS技术),其成本更低、体积更小,其波束宽度基本都在30-60°之间。通过限制波束宽度来测角的方案,自然破产了。

那么,如何通过有限的设备获得较高的角分辨率?工程上最朴素的想法就是,采用多套设备换个位置多测几次,然后通过接收信号的差异解算角度(解算过程在后面)。这也就是MIMO(Multi-input Multi output)技术的核心思想,结合了MIMO + FMCW的雷达也是车用毫米被雷达的最主流的方案。
此部分内容涉及理论+公式推导,主要来源为德州仪器的手册。
基础概念:
射频 Radio Frequency——负责接收及发射高频信号;
中频 Intermediate Frequency——射频与基频的桥梁,使信号由高频信号转成基频;
基带 Baseband——负责信号处理及储存等功能;
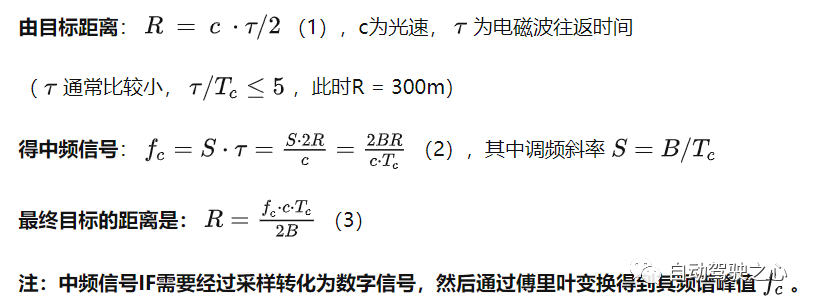
3.1 调频连续波的测距原理
如前面所言,雷达发射的调频信号的频率在其持续时间Tc内呈线性关系。其主要参数有:信号带宽B、斜率S、持续时间Tc。
3.1.1 目标的距离解算
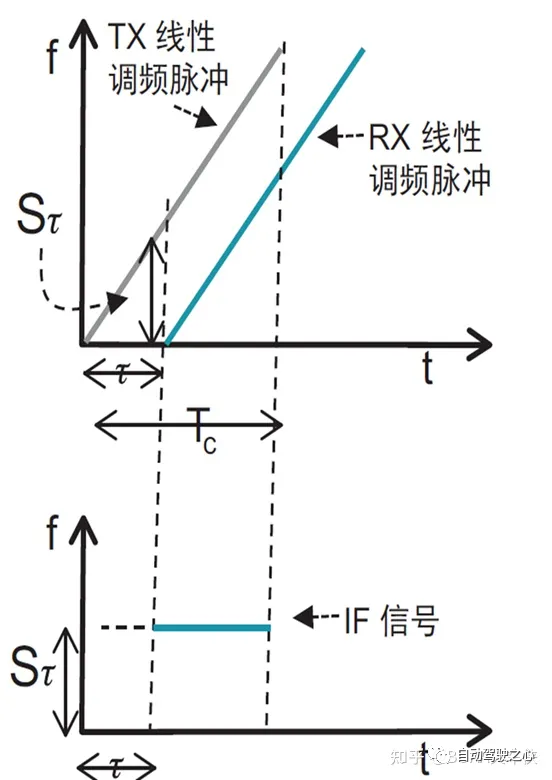
那么,雷达发射信号与回波信号进行混频,得到其差值,就是一个特定频率中频信号IF。该信号的频率与目标距离成正比。将该IF信号由ADC模块采样后转换成数字信号,即可解算获得距离信息。
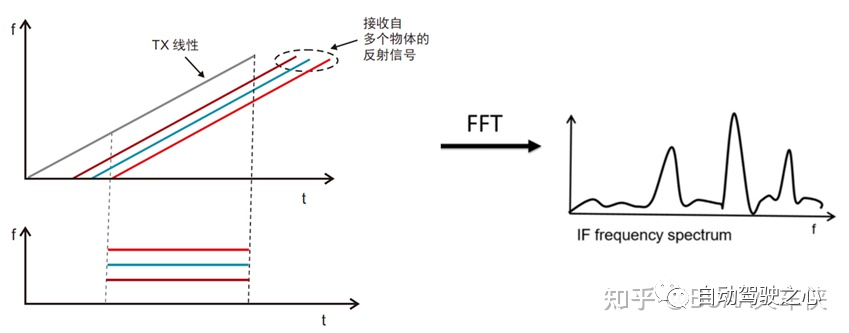
3.1.2 多个目标的检测
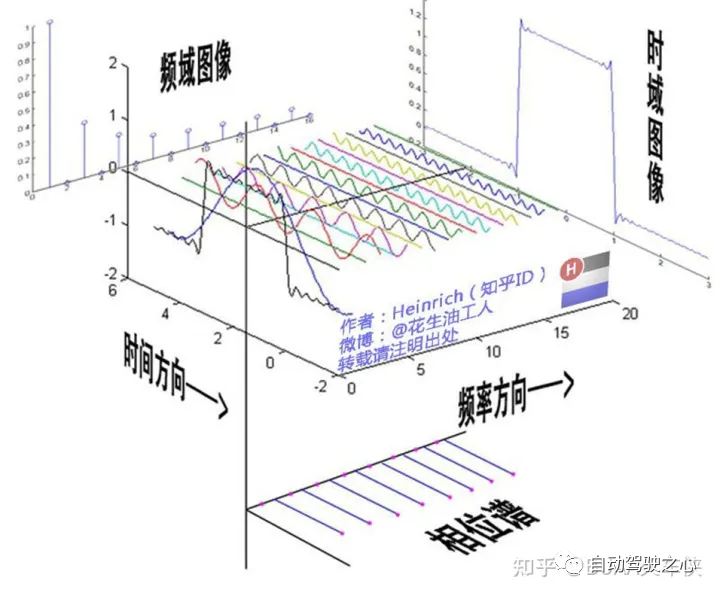
如视场内有多个目标,接收器会接收到多个反射波,中频信号IF则是由多个正弦波叠加而成。此时的做法也很简单,只要对该叠加的IF进行傅里叶变换,从信号的频谱即可得到多个频率峰值,进而计算多个目标的距离。
3.1.3 探测距离范围
制约探测距离的因素主要是ADC采样频率。根据奈奎斯特采样定理:“在AD转换过程中,采样频率大于信号中最高频率2倍时,采样后的数字信号完整地保留了原始信号中的信息(一般用2.56~4倍)”。也因此,中频信号 的上限,也就是可探测距离的上限,主要受ADC硬件的限制。
注意:该探测距离是雷达的理论值。实际工作中,探测距离会受到设备输出功率、天线增益、目标雷达横截面等参数影响。从式(3)还可看出,调频波持续时间 ?越短,相应的探测距离变小,但探测的周期也会缩短。
3.1.5 距离分辨率
距离分辨率是雷达辨别多个物体的能力,当两个物体靠近到一定程度,雷达就无法识别出这是两个物体。体现在雷达信号上,就是两个中频信号的频率相差很小,傅里叶变换无法将两个频率的峰值区分开。

那么应该如何提升频率的分辨力呢?回想《数字信号处理》,傅里叶变换理论指出:信号持续的时间越长,则频率的分辨率越高。观测窗口长度为T时,可分辨1/ T 赫兹的频率分量。

雷达测距的分辨率仅与带宽有关,比如4GHz的调频波下,测距分辨率可达3.75cm,这是一个非常不错的指标。
3.2 测速原理
前面提到雷达测速主要利用多普勒效应造成的频移,这对于频率恒定的脉冲式雷达很容易理解:接收频率与发射频率的差,即为由速度引起的变化,代入 (6)解算即可。
(6)解算即可。
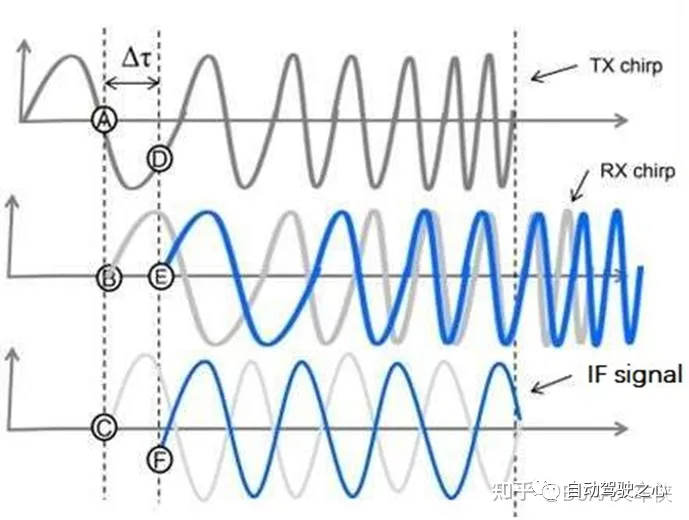
然而,对于FMCW雷达,我们采集到中频信号IF后,我们并不知道,其频率 中,由于频移造成的频率 有多少。这个时候,我们就利用“相位”来测量速度。
3.2.1 中频信号的相位信息:
中频信号的初始相位即为发射TX与接收RX的相位差: (7)。(其中 为中频信号的波长)。
(7)。(其中 为中频信号的波长)。

3.2.2 目标的速度解算
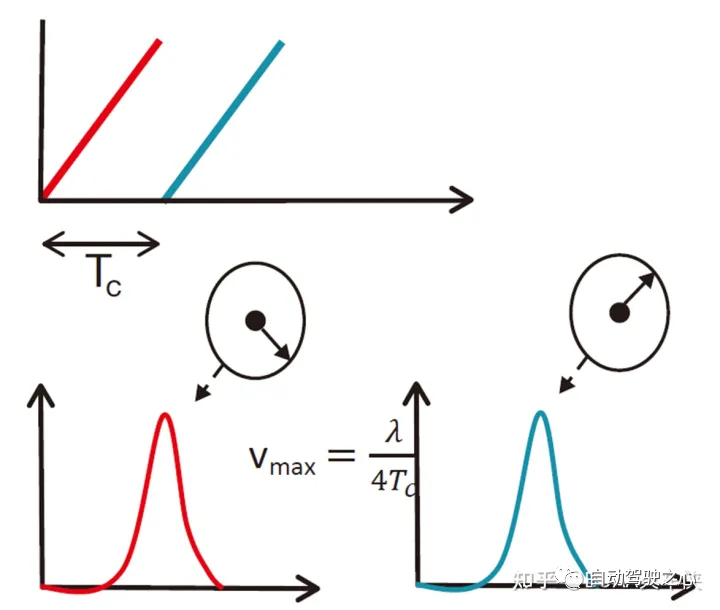
测速时,FMCW雷达会发射两个线性调频脉冲,两次反射的回波形成的中频信号经过FFT后,在频谱上的频率相同,但相位谱上的相位却不同。其相位差 (9)
(9)
可得目标速度为: (10)
(10)
3.2.3 目标的速度解算
当雷达视场内 速度不同的多个物体与雷达的距离相同时候,前面提到的双线性调频脉冲就失效了。FFT的相位谱的峰值混合叠加了多个物体的信号,无法分辨。
比如,当前有两个同位置的物体。此时,雷达需要发射一组N个(N>2)、等间隔的线性调频脉冲,称之为脉冲帧。
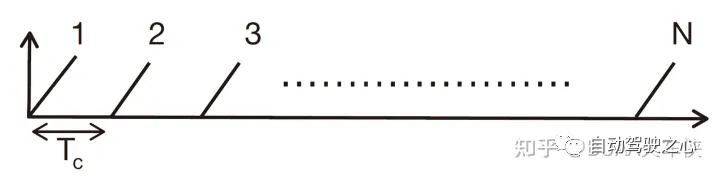
在一个脉冲帧内的数据,可以产生N个频域相同的峰值,但N个峰值的相位却不同,叠加了两个物体的相位成分(下图的红色、蓝色箭头)。
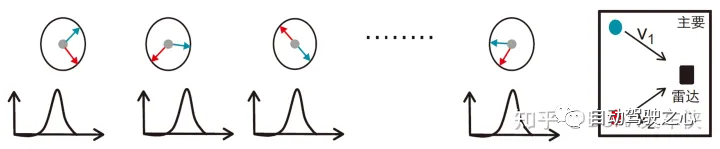
那么如何将“叠加的相位” 拆开?对N个相位数据再做一次FFT。
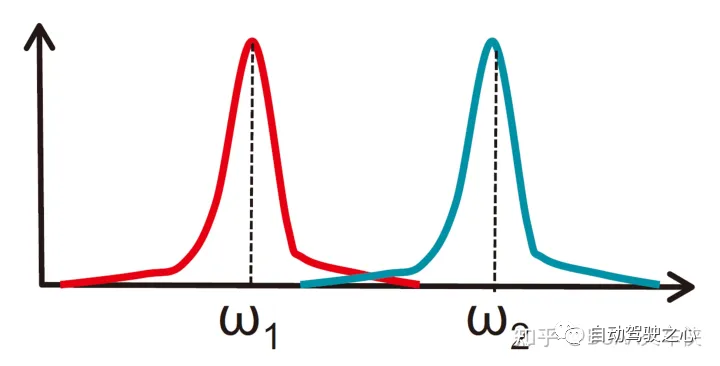
角频率和对应于两个物体在间隔的频脉冲之间产生的相位差 ,带入式
,带入式 ,即可解算出两个物体的速度。
,即可解算出两个物体的速度。
3.2.4 最大可测速度
由 可知,当目标速度增大,
可知,当目标速度增大, 也会增大。到一定程度则会超过 ,此时雷达就不知道
也会增大。到一定程度则会超过 ,此时雷达就不知道 是因为物体正向运动产生的相位差、还是反向运动而产生的相位差。所以
是因为物体正向运动产生的相位差、还是反向运动而产生的相位差。所以 的时候,雷达才不模糊。
的时候,雷达才不模糊。
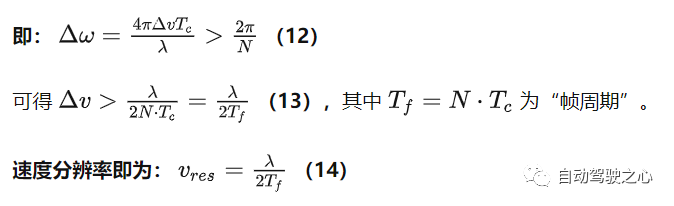
即: (11)。若要提升最大可测速度 ,则需要减小线性调频脉冲的时间。
(11)。若要提升最大可测速度 ,则需要减小线性调频脉冲的时间。
3.2.5 速度分辨率
根据傅里叶变换理论:两个离散角频率和的频率差为 时,在长度为N的序列上进行FFT时,是可以分辨的。
时,在长度为N的序列上进行FFT时,是可以分辨的。
3.3 测角原理
3.3.1 目标的角度解算
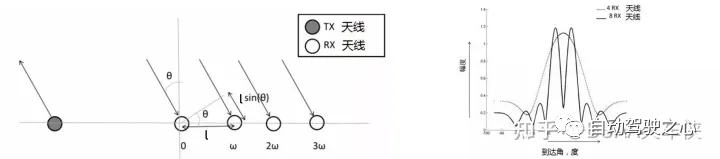
前面说过,车用雷达测角需要两个以上的RX天线,单发单收是无法实现角度估计的。其原理是:物体与两个天线的距离差 会导致FFT峰值的相位变化。
会导致FFT峰值的相位变化。
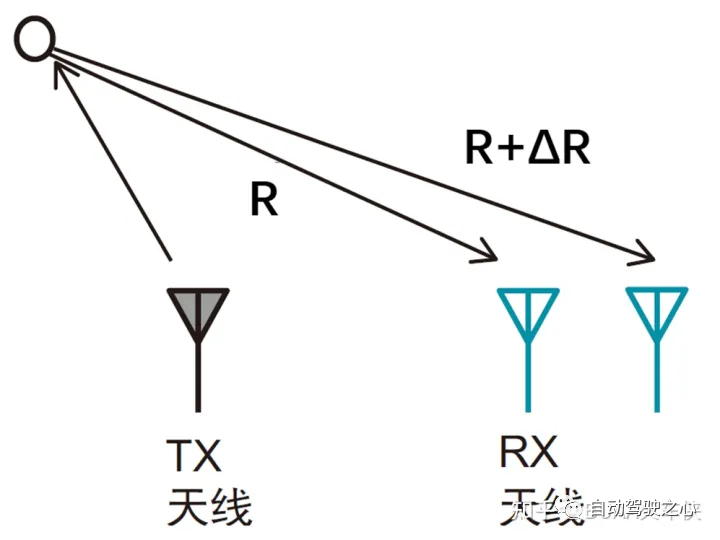
相位差为: (15)
(15)
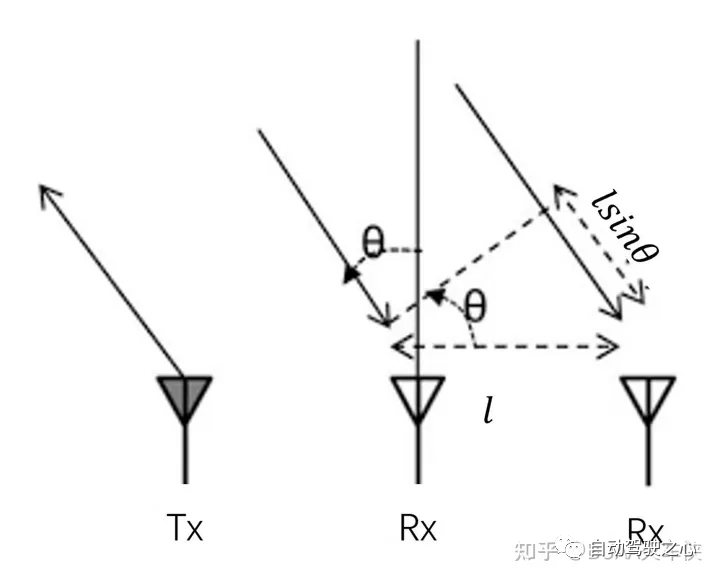
在接收平面波假设前提下,可得 (16),其中l为天线之间的距离。
(16),其中l为天线之间的距离。
则到达角为: (17)
(17)
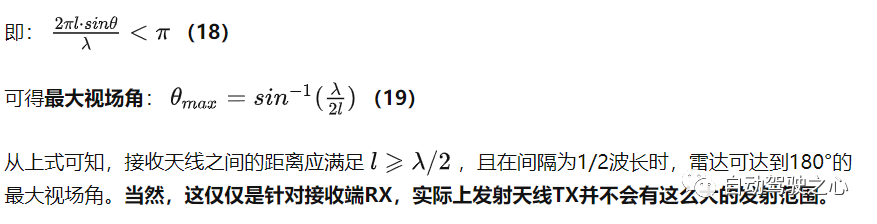
3.3.2 最大视场角
测量角度的相位差同样应该满足
3.3.3 角度测量分辨率
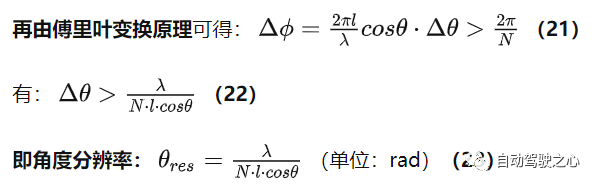
角度测量的分辨率同样可以转化为“对相位差的分辨能力问题”。由角度变化 引起的相位差的变化为:?(20)
引起的相位差的变化为:?(20)

4.1 提高分辨率的想法
角度的分辨率对雷达来说是相当重要的指标,角分辨率越高,其还原的场景也就越精细,所以要单独拿出来讨论。从角度分辨率公式(23),可以知道几个信息:
波长λ越小,角度分辨率越高,这个早已知道,现在潮流是采用更高频的77GHz雷达,原因就是如此。
天线正前方的位置,θ越小时,其分辨率越高,越靠视场角外侧,θ越大时,分辨率越低。这一特性和人眼倒是很相似。
接收天线RX之间距离 l 越大,分辨率越高。
采样的通道个数N越多,分辨率越高。
显然,要想提升雷达角分辨率。前两点几乎不能改变,所以只能从3,4两点做文章:增大接收器之间的距离,增大采样通道个数。
增大接收天线距离 l ,带来的副作用就是视场角的减小。比如,当 l=λ 时,由式(19)可知,此时的最大视场角 θ 只剩下 ±15°,因此这种方式不太行得通(当然采用相控阵技术可以实现毫米波的电扫描,增大视场角,下文会谈到)。
4.2 MIMO技术的应用
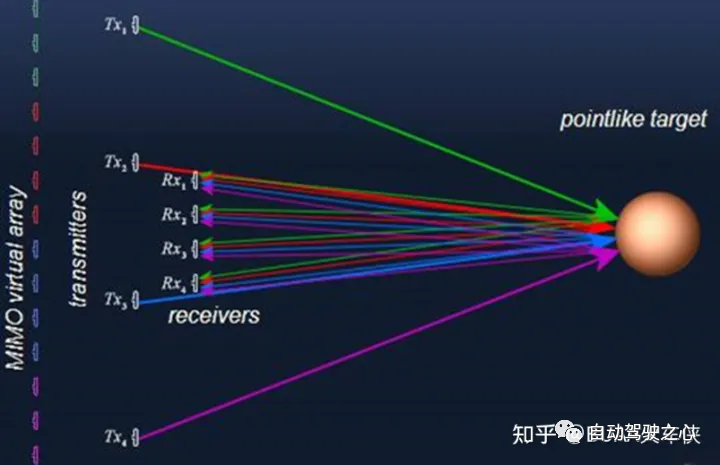
那么,看起来就剩下一条路可走:增大采样通道数量,也就是多输入多输出(MIMO)雷达。MIMO雷达拥有多个发射天线TX 和多个 接收天线RX,用户即可生成一个 N = nTX × nRX的虚拟天线阵列。
4.2.1 增加接收天线RX
以单发4收为例,此时N = 4。后面的每一个天线相对于前面一个,多了一个相移ω,呈线性增加。通过对N个天线的信号进行采样,可以形成相位信号序列的FFT。接收天线越多,角度的峰值就越尖锐,ω的分辨率越高。
应用MIMO雷达技术,可以倍增虚拟天线的数量,相应地也提高了角度分辨力。MIMO 雷达的原理,可以扩展到多维阵列。
4.2.2 增加接收天线RX
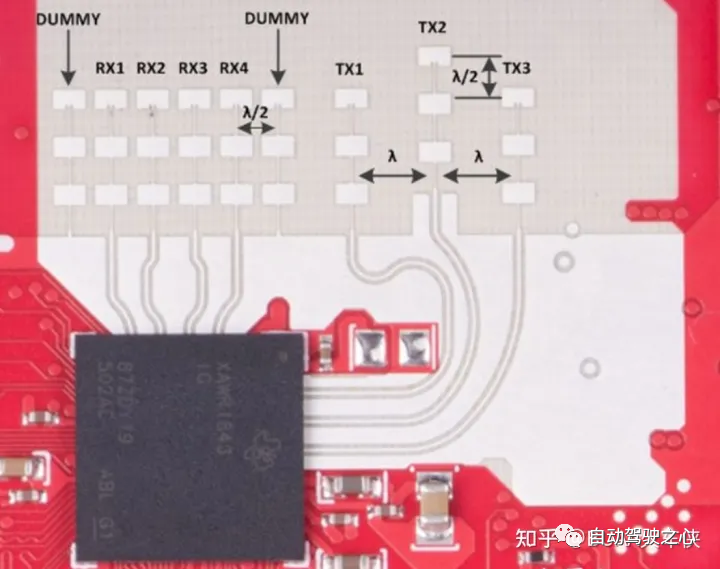
每增加一个RX天线,都要配备独立的RX处理链(各配有一个LNA、混合器、IF滤波器和ADC),显然一直增多RX天线并非好的做法,增加发射天线是更高效的方式。M个天线发射相互正交的信号,多波形信号在空间保持独立。N个接收天线采用M个匹配滤波器对回波进行匹配,从而可以得到M*N个通道的回波数据。
以两个发射天线为例,TX1发射的信号在4个RX天线上生成的相位为[0 ω 2ω 3ω]。第2个TX天线放置在与TX1相距 4 l处,TX2发射的任何信号相比于TX1都额外增加了一段路径 。
。
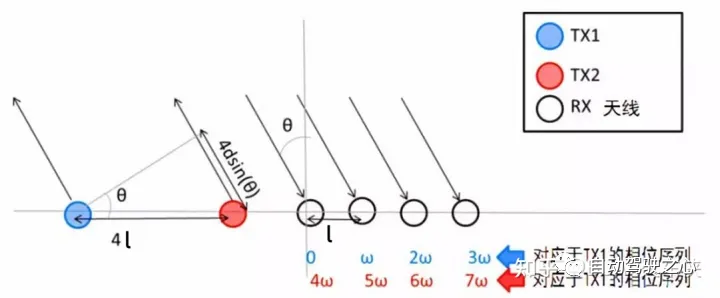
相应地,RX天线上接收TX2发射信号的相位为[4ω 5ω 6ω 7ω]。2发4收的雷达通道数N = 8,与单发8收的雷达等效。
当然,由于不同TX发射的信号为正交信号,因此无法像相控阵雷达那样,通过波束形成在空间功率合成,单个发射波束的主瓣增益将降低1/M。
“Ref 毫米波传感器基础知识 (ti.com.cn)(推荐,主要公示推导来自该参考,德州仪器手册) 4D雷达之MIMO通道分离 - 知乎 (zhihu.com) MIMO雷达基础,提高角度分辨力_天线 (sohu.com) 干货-MIMO雷达基本原理 - 知乎 (zhihu.com) 干货-MIMO雷达基本原理 - 知乎 (zhihu.com)
”
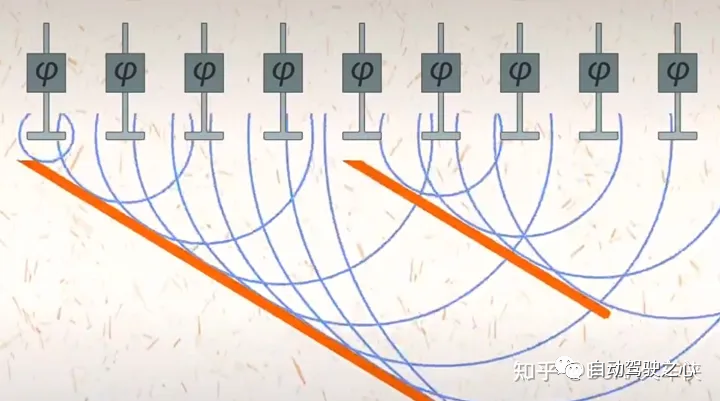
5.1 相控阵原理:电磁波的干涉
对军事感兴趣的应该常听一个概念“相控阵雷达”(Phased Array Radar,PAR)。所谓相控阵雷达,同样用到了多个单元,类似昆虫的复眼,每个单元都可以单独收发电磁波。

当这些独立的单元同时向外发射电磁波时,就会发生干涉现象。使得某一方向的电磁波加强,或使得某一方向的电磁波相互抵消。所谓“相控阵”,就是对每一个发射单元的相位进行控制,使发射波在空间进行功率合成,从而形成特定方向的电磁波。
通过改变发射阵列中的相位,生成的波束即可对空间扫描,而不需要旋转雷达本体。此时,雷达的视场(FOV)就与天线的波束宽度没有直接关系了。
5.2 PAR与MIMO的区别
虽然同是基于多天线阵元结构的雷达系统,相控阵与MIMO是有明显区别的。**首先相控阵的阵元间距通常是波长量级的,为了防止出现栅瓣,通常间距设置为 ** 。通过调节移相器,可以获得预期方向的窄波束。
。通过调节移相器,可以获得预期方向的窄波束。
而MIMO雷达的天线发射阵元间距并没未特别限定,可以是密集或稀疏的,更大的区别是MIMO是发射正交波形,且可以自由选择波形。其合成发射方向图的可控自由度远大于相控阵雷达。这种波形的分散、集合,使得MIMO雷达比一般相控阵雷达具有更好的性能。
MIMO雷达通过采用稀疏布阵,可得到最大的连续虚拟孔径,提高空域分辨率,在测角方面具有较强的优势。
也因此,事实上车用雷达一般多采用FMCW+ MIMO技术,很少采用PAR。
6.1 常规车用毫米波雷达的缺点
毫米波雷达能够作为主流的自动驾驶传感器之一,具备了两个难以替代性:
1. 相比LiDAR,Camera,毫米波雷达具有可以测量目标的相对速度。(实际上激光雷达也可以办到,但车用LiDAR侧重并不在此)
2. 恶劣天气中,Radar是唯一能够有效感知环境的传感器。
但当前,毫米波雷达仍然面临比较尴尬的现状。2021年7月,Tesla在最新的 FSD Beta V9中取消了毫米波雷达,仅采用视觉+超声的感知方案。毫米波雷达价格谈不上昂贵,Tesla出于降本的动机应该不大。
主要是因为,毫米波雷达在实际应用层面存在一些问题,当前主流车用毫米波雷达没有高程信息。以TI的AWR1843为例,其天线设计为3发4收,布置在水平面上。
所有高度的物体反射波都被投影到了垂直平面。这意味着:如果前方有一个路牌or 龙门架,毫米波雷达会反馈前方有障碍物,但并不能确定“障碍”是在空中还是在路面。
如此一来,关于静态物体的探测结果的可置信度就大大降低。因此,实际应用中,工程师往往将毫米波雷达检测到的静态目标进行滤波,只保留动态目标的追踪结果,这也就是盛传的“毫米波无法检测静态物体”说法的来源。其实不是不能检测,而是由于高程的不确定而舍弃掉了。
这就带来一个很大的隐患,如Tesla在山景城、嘉义市的事故,都是撞上了白色的集装箱车辆。首先,毫米波雷达必定检测到了前方的静态障碍,但被系统过滤掉了。对着白色的集装箱,Camera又无法获得足够的特征对其进行识别,Tesla又没有LiDAR能够探测距离,于是——卒。

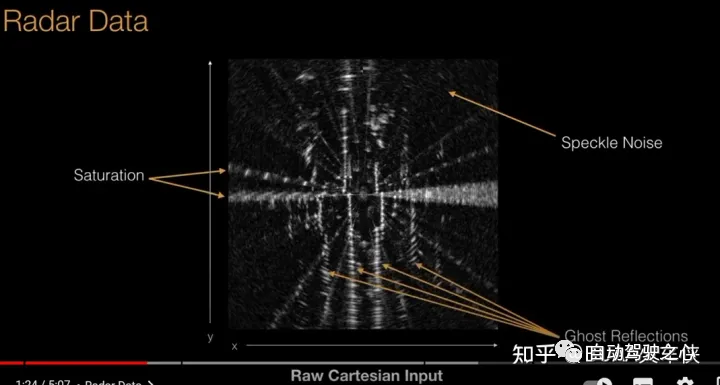
一些做自动驾驶决策的工程师表示,目前的毫米波雷达数据的确非常难以融合,信息量相对较少,数据质量还往往不高,颇似鸡肋。
“Masking by Moving: Learning Distraction-Free Radar Odometry from Pose Information - YouTube
”
6.2 4D毫米波雷达原理
毫米波雷达难用的一大重要原因就是:不具备高程信息。人们自然联想到:在垂直方向上也布置收发天线,给它加上高程信息不就行了?如此一来,路面的静态物体就不会被漏掉了。但其难点在于,天线在垂直与水平方向天线紧密排布会相互产生严重的信号干扰。

自然也有厂商做出了这方面的努力,开发了4D FMCW MIMO High Resolution Radar,即所谓的“4D毫米波雷达”。4D指的是3D的坐标信息+速度信息。Conti(ARS540),TI,华为,以色列的Vayyar,Arbe等公司都发布了4D毫米波雷达产品。其原理不外乎采用MIMO继续增多收发天线的阵列。
比如华为在2021年发布了12TX,24RX的4D成像雷达(未量产)。业界跳的比较欢的,当属Arbe的旗舰产品Phoenix,具备了48发,48收,一共2300个信道,性能远超一般的3发4收的现行产品。Arbe宣称其产品具备:1°的横向角分辨率和2°的纵向角分辨率,100°的水平视角和30°的垂直视角,2K点云,其成本能控制在150USD以内。

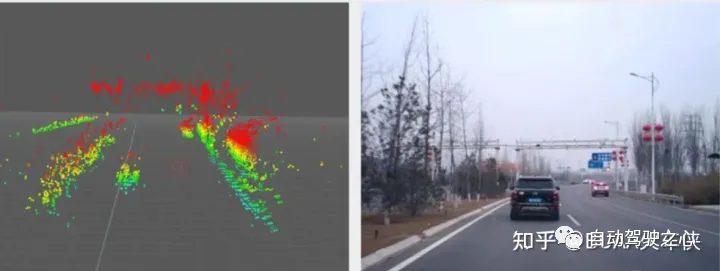
下方是Arbe于2020年底给出的产品测试Demo。
“Arbe: Radar Revolution. Delivered. - YouTube
”
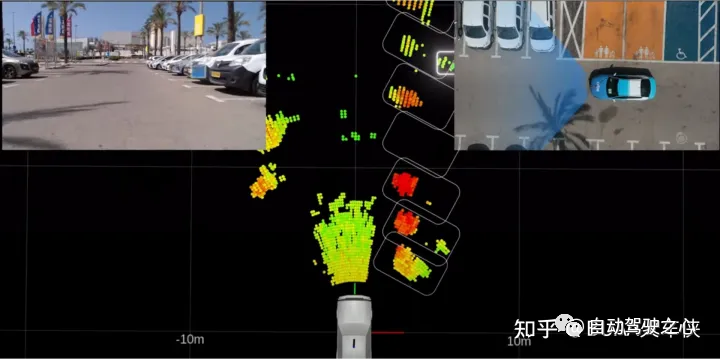
从视频中可以发现,尽管其3D点云和仍然很难称之为“密集”,但已经可以对行人、车辆做出追踪;对垂直方向上的龙门架、立交路面做出精确判断。其数据与Camera,LiDAR的可融合性大大提升。
Arbe甚至吹嘘其产品可以挤占激光雷达的市场,吹牛博眼球的成分较大。由于雷达的发射原理,以及毫米波物理极限的限制,4D毫米波雷达不大可能形成足够密集的点云,其信息丰富度不足以独立支撑自动驾驶车辆。
更何况,基于FMCW技术的4D激光雷达目前也在研发中,其同样能够提供速度数据,文章的后面会提到。同样如果能够成功的话,也会挤占毫米波雷达的生存空间。
另一家以色列的公司RFIsee,则开发出了基于相控阵技术的4D雷达。
“RFISee Radar Output 2 1 - YouTube
”
6.3 量产案例:2022.07.26 长安深蓝SL03——森斯泰克
2022.07.25日,长安深蓝发布的第一款增程混动车型SL03是中国第一款搭载4D毫米波雷达的车型,供应商为国内厂家森思泰克,其可在水平120°、纵向30°的视场中提供1.2°水平 x 2.5°纵向的角分辨率,即一帧包含1200个点。

对毫米波雷达的讨论篇幅比较长,但这是有必要的。其中,对FMCW、多普勒效应、MIMO、相控阵的原理解释,也有助于理解后续LiDAR的内容。
Ref:
华为发布4D成像雷达等智能化部件 (baidu.com)
4D毫米波雷达真的来了吗?- 知乎 (zhihu.com)
RFISee – Developing the world’s first 3D imaging-radar-on-1-chip, providing the next generation ears and eyes for autonomous vehicles, drones, robots etc.
长安SL03 & 森思泰克:
森思泰克高分辨4D成像雷达:多目标定位与识别精准呈现 (qq.com)
森思泰克在车载毫米波雷达方面做的如何?- 知乎 (zhihu.com)
疑问:
雷达天线应当如何设计才能减小波瓣宽度,是否有简单通俗的举例?
思考:脉冲毫米波雷达因为何种原因存在盲区、模糊?为何FMCW的激光雷达不存在盲区?(原因:1、方向分辨率差异;2、脉冲重复频率(PRF))
Radar - WikipediaMillimeter wave scanner - WikipediaDirectional antenna - Wikipedia
《雷达原理》——西安电子科技大学出版社
MIMO雷达基础,与相控阵雷达的区别 - 知乎 (zhihu.com)
正交信号_百度百科 (baidu.com)
天线设计理论第四期:十分钟掌握天线的方向图_哔哩哔哩_bilibili
雷达中的方位角分辨率和波束宽度有什么关系?- 知乎 (zhihu.com)
汽车毫米波雷达的(方位)角分辨率和方位角波束宽度是什么概念?什么意思?- 知乎 (zhihu.com)
走进自动驾驶传感器(二)——毫米波雷达 - 知乎 (zhihu.com)
毫米波雷达自学笔记 - 知乎 (zhihu.com) (推荐阅读)
傅里叶分析之掐死教程(完整版)更新于2014.06.06 - 知乎 (zhihu.com) (推荐阅读)
相控阵雷达_百度百科 (baidu.com)
国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称
-
2018-05-18CMS是如何应运而生的?
-
2018-05-18网站建设,静态页面和动态页面如何选择
-
2018-05-18网站建设的五大核心要素
-
2018-05-17一文读懂互联网女皇和她的报告:互联网领域的投资圣经、选股指南
-
2018-05-17新手科普文!什么是用户界面和体验设计?
-
2018-05-17用户界面设计和体验设计的差别





